

日本電気株式会社
- 事業・業務プロセスの改善
- 故障や異常の予兆検知、予防
- 故障や異常への迅速な措置
- その他(道路DXの実現)
【活用対象】
- 他企業とのアライアンス・コミュニティ内
- 社会全般
IoT導入のきっかけ、背景
日本電気株式会社(以下NEC)は、強みである通信・AIなどの技術を顧客価値に転換する社会価値創造を成長領域と位置付けている。その一つが、地域が抱える課題の解決である。
地域課題の解決は自社のみでは難しく、自治体や地域の大学、企業など、様々なステークホルダと関係を築いて課題を共有し、技術やノウハウを組み合わせていくことで、人々にとって安全安心・魅力的で活気のある社会を実現できると考えている。
今回の実証の舞台となった群馬県前橋市は、人口33万6千人を擁する中核都市で、物価が安く、医療が充実し、待機児童数が少ないことから住みやすい街として知られている。その一方で、自動車の保有率が全国1位で日々の移動がマイカー主体となっており、路線バスの利用率が低い。
免許を持たない高齢者や若年者の移動は、公共交通インフラや免許を持つ親族などに頼らざるを得ない。この面で公共交通インフラは重要な役割を担っているが、路線バスの利用率が低い中でバス会社への助成を含めた路線バスの振興施策や年々深刻になるドライバー不足への対応が急務となっている。
前橋市は、5Gを活用した自動運転が路線バスの課題解決につながることに早くから着目し、「前橋5G社会実装プロジェクト」を2019年に立ち上げて自動運転の実現に取り組んでいた。またNECは、2019年から自動運転の研究を行っている国立大学法人群馬大学(以下、群馬大学)と通信の領域で産学連携を進めていた。
こうした中で、2020年に総務省から「地域課題解決型ローカル5G等の実現に向けた開発実証」の提案募集があり、産学地域が連携したコンソーシアム(表-1を参照)を組んで行った提案が採択されて今回の実証を行った。今後も継続して連携を進めて一日も早い自動運転バスの社会実装をめざしている。
表-1 前橋市自動運転バス公道実証コンソーシアムの構成
| 一般社団法人ICTまちづくり共通プラットフォーム推進機構(TOPIC) | 全体統括、コンソーシアム事務局 |
| 国立大学法人群馬大学 | 前橋5Gの自動運転連携に関する技術分析評価およびその実装と横展開に関する検討 |
| 日本モビリティ株式会社 | 5G対応型遠隔管制システム、5G対応型自動運転システムの提供 |
| 日本電気株式会社(NEC) | 技術統括、ローカル5G基地局・エッジコンピューティング・通信安定化技術の提供、他地域実証推進 |
※キャリア5G基地局(キャリー5G™)は株式会社NTTドコモ(以下、NTTドコモ)が提供
IoT事例の概要
名称、関連URL
名称: 群馬県前橋市での5G技術を活用した自動運転バスの公道実証
~総務省ローカル5G開発実証事業の委託を受け、自動運転バスの社会実装を目指す~
関連URL: https://jpn.nec.com/press/202101/20210108_01.html
実証の概要
図-1に今回行った実証の概要を示す。
群馬大学と日本モビリティ株式会社が研究開発を行っている自動運転は、自動運転車を運行する地域を限定していること、遠隔管制室から監視を行う遠隔型自動運転という特徴がある。遠隔型にすることによって、将来的には複数のバスを管制室1名で運行監視できるようになり、ドライバー不足などの地域交通の課題を解決できる。
今回の実証システムでは、通常の自動運転走行は車両が自律的に行っているが、異常がないかを遠隔管制室から監視している。これによって、安心安全な運行を実現している。
遠隔管制室からの監視は、車両および路側に設置したカメラ画像やセンサ情報によって実現している。路側カメラは、車両から見えない死角の状態を認識するために使用しており、混雑が発生するターミナルや交差点などに設置している。監視のためには、図中の①に示す「車両―遠隔管制室間」の通信、「路側―遠隔管制室間の通信」が必要となる。この2つの通信は、群馬大学・日本モビリティが開発したシステムで当初から使われているが、今回5Gによる通信速度の向上に加えて、NECが開発したAIによる学習と予測を使用した通信安定化技術(詳細は後述)を適用して監視精度の向上を行った。
遠隔管制に加えて、エッジコンピューティングを使用した「車両-路側間の直結制御」の実証も行った(図中の②)。遠隔管制では、通信の遅延などによって、衝突の危険を判断した時には既に相手との距離が近く、緊急停止(急ブレーキ)となる場合が考えられる。そこで、遅延が少ないエッジコンピューティングを使用したソリューションをNECが提案して今回の実証に加えている。例えば、図-2に示すように、交差点で側面から近づいてくる車を路側カメラで認識してこのまま双方が走行すると衝突が発生する危険を予測し、エッジコンピュータが制動距離を加味してバスに直接停止指示を出す。遠隔管制による緊急停止より急ブレーキになる度合いが少ないため、乗客にとってより安全性が高い停止ができる。
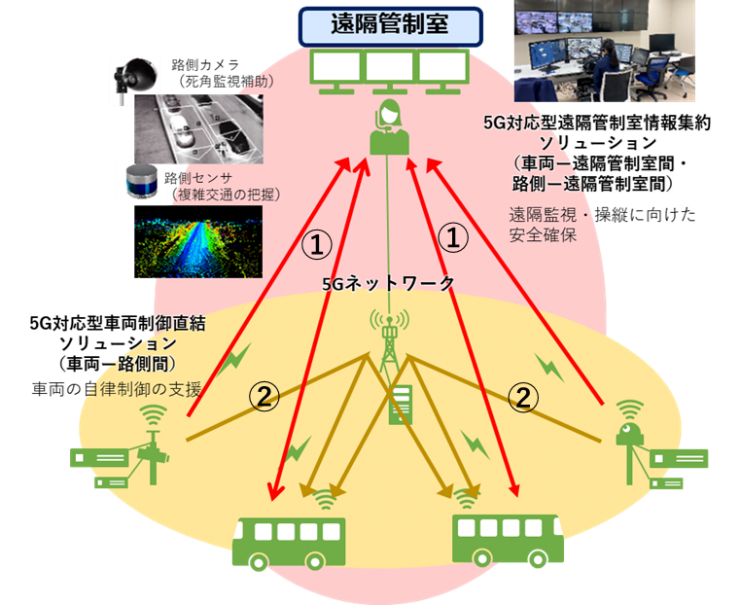
図-1 実証の概要図
出所:NEC Webページ)
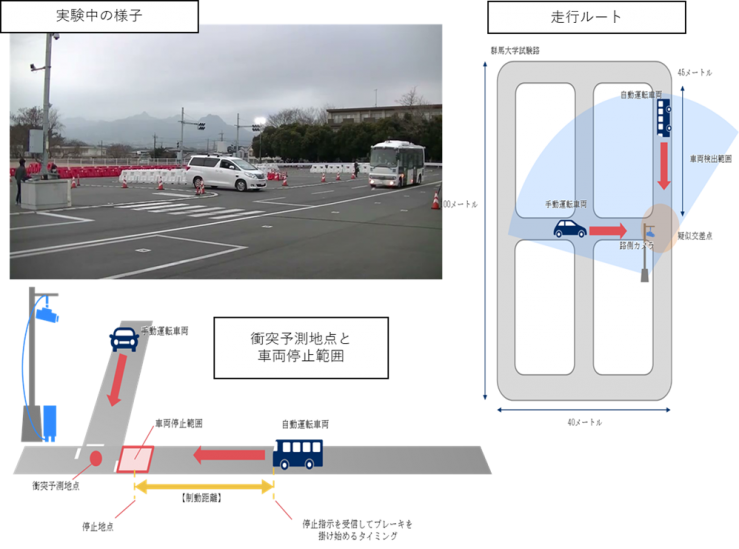
図-2 エッジコンピューティングを使用した衝突予測
(出所:コンソーシアム提供資料)
実証の内容詳細
(1) 試験路と公道での実証を併用
実証は、群馬大学次世代モビリティ社会実装研究センター(CRANTS: Center for Research on Adoption of NextGen Transportation Systems)が所有する試験路と、実際のバスルートである約1kmの公道を使用して行った(写真-1~3を参照)。まず、試験路を使用した実証で今回使用する技術の安全性を確かめた後に公道での実証を行っている。エッジコンピューティングを使用した「車両-路側間の直結制御」は安全性に配慮して試験路のみで実証した。
公道での実証は、実際に乗客を乗せて運賃もいただくという、全国的にも数が少ない形態で実施している。バスは遠隔管制による自動運転で走行するが、今回はドライバーも乗車し、緊急時にはドライバーの判断で手動運転に切り替えることで安全性を担保した。

写真-1 CRANTSの試験路を使用した実証の風景(CRANTSの設備)
(出所:コンソーシアム提供資料)

写真-2 公道での実証の風景(前橋中央駅の設備)
(出所:コンソーシアム提供資料)

写真-3 自動運転バスの設備
(出所:コンソーシアム提供資料)
(2) ローカル5Gとキャリア5Gの併用
試験路の5G通信は、電波干渉が少ない安定した私設通信網として使用できるローカル5Gの設備をNECが設置した。自動運転を社会実装する際に、キャリア5Gのサービスエリアと自動運転を行いたいエリアが一致しないときなどにローカル5Gの活用が期待される。公道の実証では、NTTドコモがキャリア5Gの可搬型基地局を設置した。
(3) 「5G×自動運転」における学習型の通信安定化技術
5Gでは4Gに比べて大幅な高速通信を実現しているが、移動通信では5Gといえども移動に伴い電波状態の変動などが発生してしまうため、自動運転というクリティカルな領域では通信品質を可視化・予測し、それに応じてカメラ映像の送信データ量を調整し通信の安定化を実現することが必要となる。そのために、以下に示す2つの技術を提供した。
□ 学習型通信品質予測技術
従来は、通信スループットの変動を時系列な変化から予測していたのに対して、この技術では位置の変化による通信品質の変動パターンを予測する(図-3を参照)。これによって、通信品質が低下する位置を走行している際でも、監視に必要なクリティカルな画像情報を、たとえ伝送レートを落としてでも切れないように伝送し続けることができる。
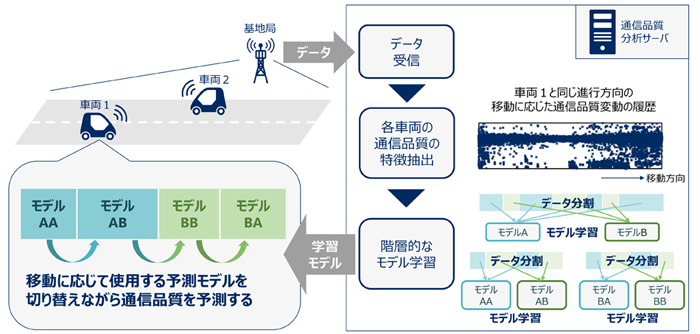
図-3 学習型送信品質予測技術
(出所:NEC Webページ)
□ 学習型メディア送信制御技術
移動する車から映像を送信しようとすると5Mbpsほどの大きな情報を通信する必要がある。5Gとはいえ通信速度は常に変動するため、通信の乱れによるノイズや遅延が発生し、これによって危険な状態の判定が遅れてしまう可能性がある。
本技術では、AIが対向車や信号などの監視上注目すべき画像と建物などの重要でない画像を見分け、注目すべき領域を優先して伝送する(図-4を参照)。これによって、映像伝送に必要な帯域を1/10程度に削減し、安定した監視が実現できる。

図-4 学習型メディア送信制御技術
(出所:NEC Webページ)
実証の成果
試験路での評価で、ローカル5Gの使用が自動運転の監視範囲向上に有効であることを確認した。従来の4Gを使った映像伝送では、伝送速度の制限から解像度がXGA(1024×768ピクセル)にとどまっていたが、今回の実証ではローカル5GによりフルHD解像度(1920×1080ピクセル)の4つのカメラ映像をコマ落ちせず伝送することに成功した。この高解像度化によって、従来は識別限界が45mであったのに対して100m先までを識別できるようになった(図-5を参照)。
路側カメラの画像にAI処理を加え、遠隔管制室の監視作業の補助に有効であることを確認した。
エッジコンピューティングを使用した衝突危険判定では、路側カメラの情報取得から車両の停止指示までの目標時間を0.4秒と設定し、評価でこの目標を達成できることを確認した。0.4秒は人の認知による停止操作時間より短い値であり、安全性の向上に寄与することが確認できた。

図-5 遠隔管制室の5G監視画面
(出所:コンソーシアム提供資料)
取り扱うデータの概要とその活用法
- 車両・路側カメラの映像
- 路側カメラ映像をAIで解析したデータ(車速、方向などから衝突を予測)
事業化への道のり
苦労した点、解決したハードル、導入にかかった期間
今回ローカル5Gを使用した通信網を試験路に設置したが、新しい通信技術であるため、安定して電波を出せるようになるまでに苦労があった。最終的には安定した通信を実現したが、遮蔽物の影響などの対応を要した箇所があった。
エッジコンピューティングを使用した路側カメラ画像による衝突予測では、AIの処理時間の短縮が課題となっていたが、Deep Learning部分を最適化することにより一般的なAIアクセラレータで0.4秒という遅延時間の目標を達成することができた。今後も更なる処理時間の短縮を目指していく。
技術開発を必要とした事項または利活用・参考としたもの
今回提供した学習型通信品質予測技術と学習型メディア送信制御技術は、NECが得意とする画像処理とAIの技術を、「5G×自動運転」というユースケースに当てはめて発展させたものである。NECの研究所が持つ技術のアセットと事業部サイドがお客様との議論などで得たユーザニーズを融合して新たなソリューションを作り出すことができた。
今後の展開
現在抱えている課題、将来的に想定する課題
遠隔型自動運転を社会実装するためには、路側センサの設置などのインフラ構築とその維持管理コストが発生する。自動運転バスを持続的なサービスとするためには、このインフラコストをできるだけ広く浅く負担できる仕組みをつくることが重要と考えている。
NECは、コンソーシアムの関係者とも引き続き連携し、上記のようなインフラを様々な分野に横展開したい。例えば見守りや物流などの事業者がこのインフラを利用できるようにすることによって、広く浅い費用負担が実現できるのではないかと考えている。
強化していきたいポイント、将来に向けて考えられる行動
今回実証した路側カメラ・センサを使用した路車協調による自動運転の世界観に賛同いただける企業との共創を実現するために、様々な情報発信を強化していきたい。
将来的に展開を検討したい分野、業種
モビリティ分野にとどまらず、実証で使用した技術やインフラを活用したビジネスが可能な業種の方々との連携を進めたい。
本記事へのお問い合わせ先
NECクロスインダストリー事業開発本部
e-mail : ci-service-support@zaq.jp.nec.com
関連記事
【ここに注目!IOT先進企業訪問記】第50回 社会課題から5G・AIの活用を考える-NECの遠隔型自動運転バス支援の取り組み